22/04/2019 - 16:10
Pesquisadores da Escola de Engenharia e Ciências Aplicadas John A. Paulson da Universidade de Harvard desenvolveram robô inspirado em serpentes que é mais rápido e preciso que seu antecessor.
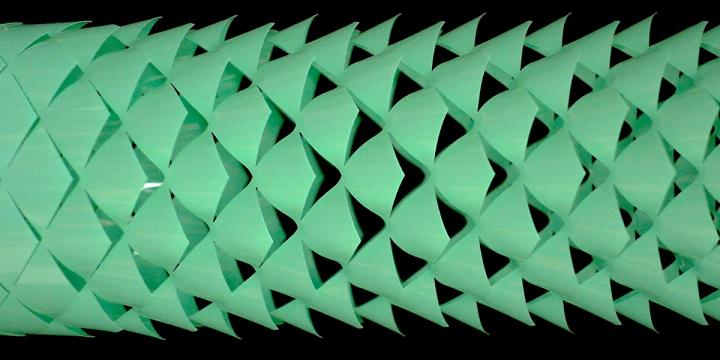
O robô foi desenvolvido usando “kirigami” – um papel japonês que depende de cortes para mudar as propriedades de um material. À medida que o robô se estica, a superfície do kirigami se transforma em uma superfície texturizada em 3D, que se prende ao chão como a pele de uma cobra. Os cientistas chamam essas mudanças nos movimentos do robô de “pop-ups”, como naqueles livros em que as ilustrações “saltam” para fora das páginas.
A primeira geração de robôs criada por essa equipe usava uma folha de kirigami plana, que se transformava de maneira uniforme quando esticada. Já o novo robô é mais maleável, o que significa que os cortes no papel podem ser moldados conforme desejado, melhorando a velocidade e a precisão do robô.
A pesquisa foi publicada na revista científica “Proceedings of National Academy of Sciences“.
Segundo Ahmad Rafsanjani, autor principal do artigo, esse é o primeiro exemplo de uma estrutura de kirigami com “deformações” pop-up não uniformes. “Esse tipo de controle da transformação da forma pode ser usado para projetar superfícies responsivas e peles inteligentes que atendam a mudanças na sua textura e morfologia sob demanda.
A nova pesquisa combinou duas propriedades do material – o tamanho dos cortes e a curvatura da folha. Ao controlar esses recursos, os pesquisadores conseguiram programar a propagação dinâmica desses movimentos de “pop-ups” de um lado para o outro.
Futuramente esse tipo de robô poderia ser usado para pesquisas de exploração em terrenos de difícil acesso, inspeções, monitoramentos, missões de resgate ou até realizar procedimentos médicos por laparoscopia.
Veja um vídeo mostrando como o robô funciona:




